CUDA Tips: nvcc’s -code, -arch, -gencode
Introduction People may feel confused by the options of -code, -arch, -gencode when compiling their CUDA codes. Although the official guidance explains the d...

On my previous post Inside Normalizations of Tensorflow we discussed three common normalizations used in deep learning. They have in common a two-step computation: (1) statistics computation to get mean and variance and (2) normalization with scale and shift, though each step requires different shape/axis for different normalization types. Among them, the batch normalization might be the most special one, where the statistics computation is performed across batches. More importantly, it works differently during training and inference. While working on its backend optimization, I frequently encountered various concepts regarding mean and variance: moving mean, batch mean, estimated mean, and even saved mean to name a few. Therefore, this post will look into the differences of these terms and show you how they are used in deep learning framework, Tensorflow Keras Layers, and deep learning library, CUDNN Batch Norm APIs.
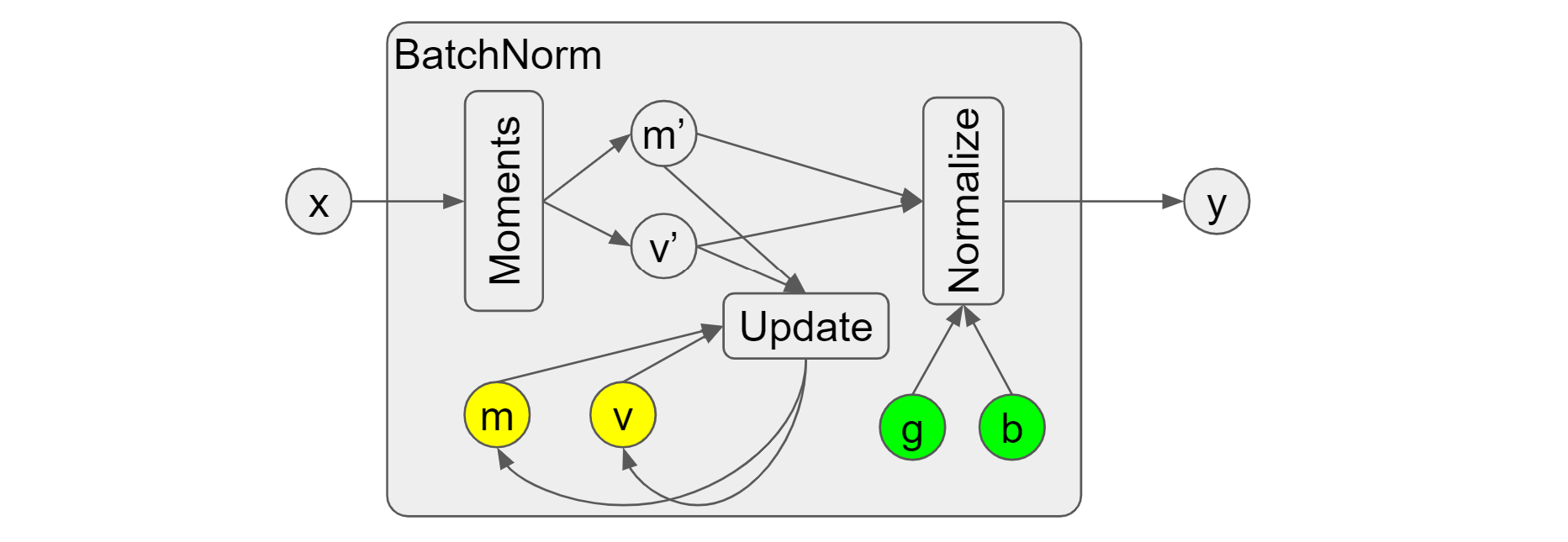
In a typical batch norm, the “Moments” op will be first called to compute the
statistics of the input x, i.e. the batch mean/variance (or current
mean/variance, new mean/variance, etc.). It reflects the local
information of x. As shown in Figure 1, we use m' and v' to represent
them. After statistics computation, they are fed into the “Update” op to obtain
the new moving mean/variance (or running mean/variance). The formula
used here is moving_* = moving_* ⋅ momentum + batch_* ⋅ (1 - momentum)
where the momentum is a hyperparameter. (Instead, CUDNN uses a so called
exponential average factor and thus its updating formula becomes moving_* =
moving_* ⋅(1 - factor) + batch_* ⋅factor.) In the second step for
normalization, the “Normalize” op will take the batch mean/variance m'
and v' as well as the scale (g) and offset (b) to generate the output y.
Figure 1. Typical batch norm in Tensorflow Keras
The following script shows an example to mimic one training step of a single batch norm layer. Tensorflow Keras API allows us to peek the moving mean/variance but not the batch mean/variance. For illustrative purposes, I inserted codes to the Keras python APIs to print out the batch mean/variance. Note, the moving mean/variance are not trainable variables so that they cannot be updated during the backpropagation. For this reason, we skip the backward pass in the training step.
bn = tf.keras.layers.BatchNormalization(momentum=0.5,
beta_initializer='zeros', gamma_initializer='ones',
moving_mean_initializer='ones', moving_variance_initializer='ones',
fused=False)
# Training Step 0 (skip the real scale/offset update)
x0 = tf.random.uniform((2,1,2,3))
print("x(step0):", x0.numpy())
y0 = bn(x0, training=True)
print("moving_mean(step0): ", bn.moving_mean.numpy())
print("moving_var(step0): ", bn.moving_variance.numpy())
print("y(step0):", y0.numpy())
The outputs of the above code are pasted below and we can see that the moving
mean/variance are different from the batch mean/variance. Since we set the momentum
to 0.5 and the initial moving mean/variance to ones, the updated mean/variance
are calculated by moving_* = 0.5 + 0.5 ⋅batch_*. On the other hand, it can
be confirmed that the y_step0 is computed with the batch mean/variance through
(x_step0 - batch_mean) / sqrt(batch_var + 0.001)
x(step0):
[[[[0.16513085 0.9014813 0.6309742 ]
[0.4345461 0.29193902 0.64250207]]]
[[[0.9757855 0.43509948 0.6601019 ]
[0.60489583 0.6366315 0.6144488 ]]]]
!!! batch_mean:
[0.5450896 0.5662878 0.63700676]
!!! batch_var:
[0.08641606 0.05244513 0.00027721]
moving_mean(step0):
[0.7725448 0.7831439 0.8185034]
moving_var(step0):
[0.543208 0.5262226 0.50013864]
y(step0):
[[[[-1.2851115 1.4499114 -0.16879845]
[-0.37388456 -1.186722 0.15376663]]]
[[[ 1.4567168 -0.5674678 0.6462345 ]
[ 0.20227909 0.30427837 -0.6312027 ]]]]
To make it closer to real settings, we conduct one more training step with
another input x and these are the moving mean/variance we can get:
moving_mean(step1):
[0.72269297 0.63172865 0.62922215]
moving_var(step1):
[0.29549128 0.28121024 0.25281417]
At last, we mimic one step of inference as below. In the script, we rename the moving mean/variance to estimized mean/variance, which represents the accumulated and frozen moving mean/variance from the training stage.
# Inference Step
x_infer = tf.random.uniform((2,1,2,3))
print("x(infer):", x_infer.numpy())
y_infer = bn(x_infer, training=False)
print("estimated_mean(infer): ", bn.moving_mean.numpy())
print("estimated_var(infer): ", bn.moving_variance.numpy())
print("y(infer):", y_infer.numpy())
From the outputs below, it is easy to verify that y_infer is computed with the
estimated mean/variance rather than batch mean/variance: (x_infer -
estimated_mean) / sqrt(estimated_var + 0.001). Besides, we can see that the
estimated mean/variance equals to the moving mean/variance from the above step1,
indicating they are no longer updated in inference stages. To sum up, the takeaway
here is that the batch norm will keep accumulating batch mean/variance into the
moving mean/variance during training, which will be evolved into frozen
estimated mean/variance to be used during inference.
x(infer):
[[[[0.8292774 0.634228 0.5147276 ]
[0.39108086 0.5809028 0.04848182]]]
[[[0.1776321 0.70470166 0.49190843]
[0.3460425 0.5079107 0.2216742 ]]]]
estimated_mean(infer):
[0.72269297 0.63172865 0.62922215]
estimated_var(infer):
[0.29549128 0.28121024 0.25281417]
y(infer):
[[[[ 0.1957438 0.00470471 -0.22726214]
[-0.60901 -0.09567499 -1.1527207 ]]]
[[[-1.0010114 0.13736498 -0.2725562 ]
[-0.69172347 -0.2330758 -0.8089484 ]]]]
The complete python script is here.
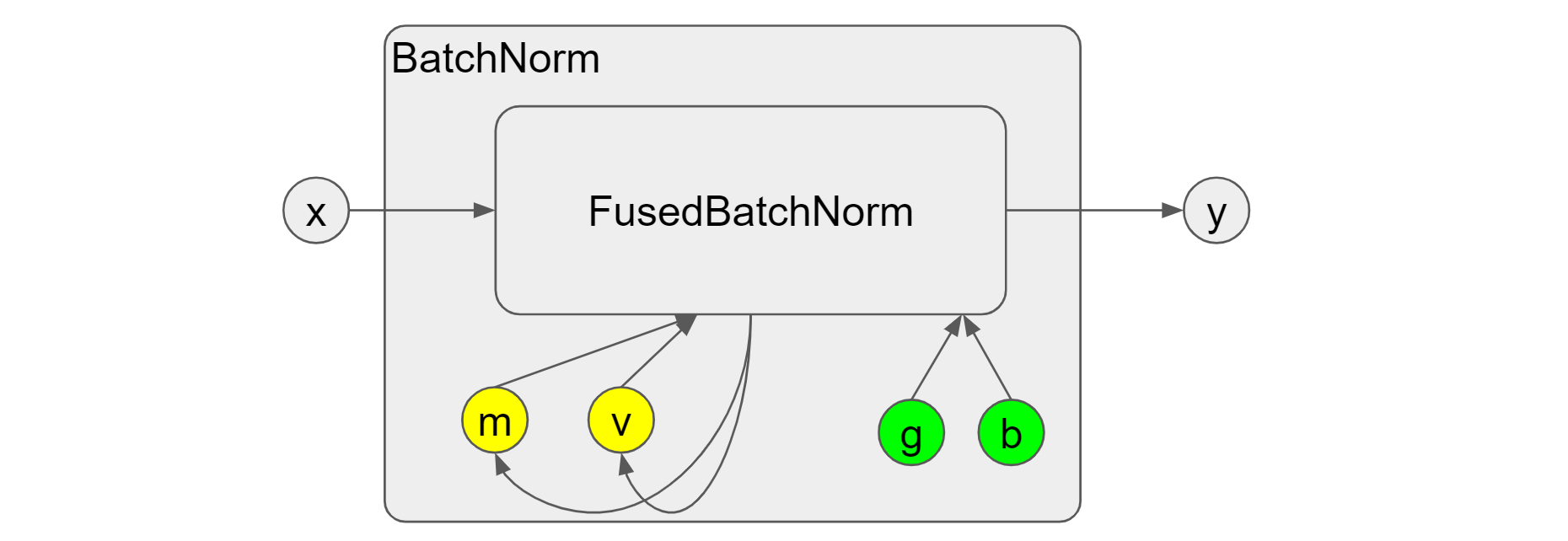
In the above example we explictly turned off the operation fusion by setting
fused=False of the Keras BatchNormalization layer. In practice, however, we
usually set it to None (to use fusion whenever possible) or True (to force
the fusion) for better speedup. Figure 2 shows what the fused operation looks
like in batch norm. There is only one big op FusedBatchNorm and its
inputs/outputs are consistent with the combined “Moments” + “Update” +
“Normalize” ops in Figure 1. Whereas there is no simple way to get the batch
mean/variance m' and v', which will pose a bigger challenge for the
synchronized batch norm that we will talk about later. In addition, it is worth to mention that we can’t
assume the bitwise equality of the outputs from the fused op and non-fused ops.
Figure 2. Fused batch norm on GPUs
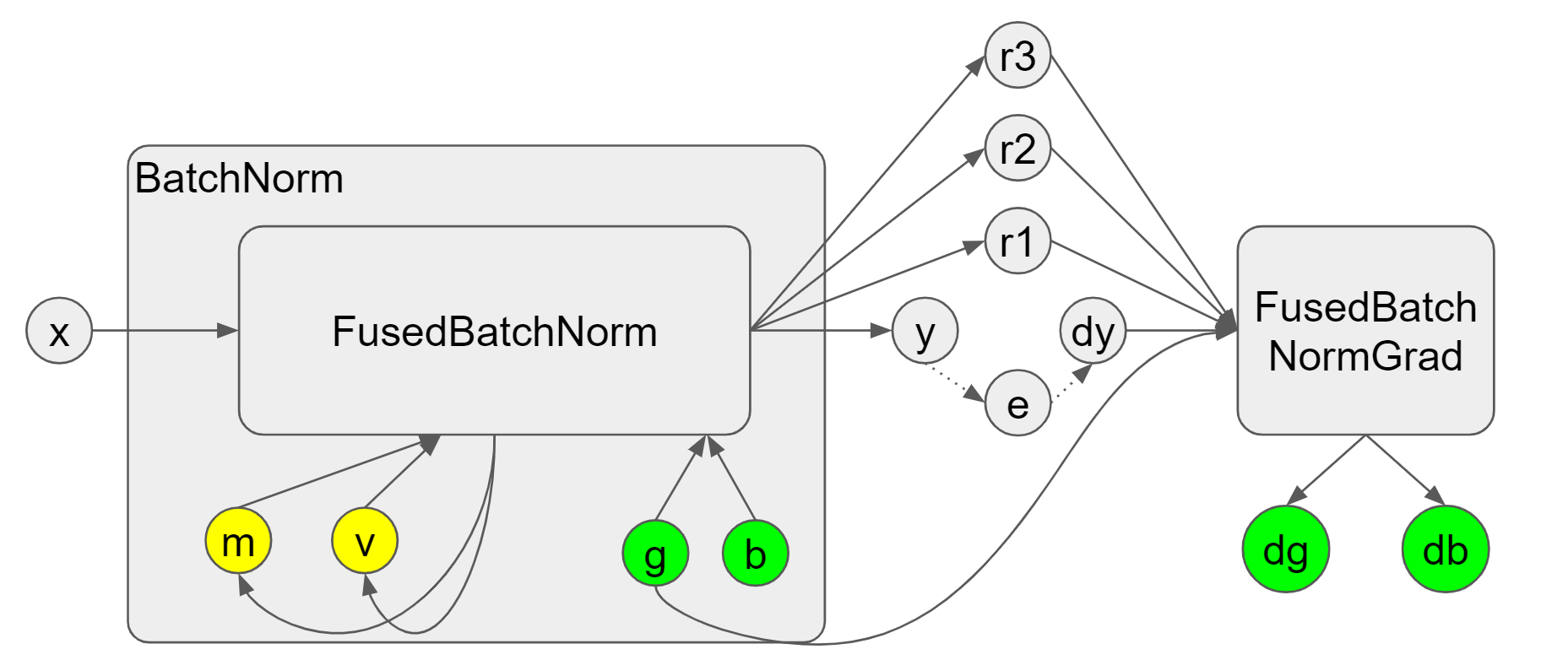
The backend of the FusedBatchNorm relies on the CUDNN library for GPUs, which
introduces another terms: saved mean and inverse variance. As shown in
Figure 3, we depict a forward and backward pass of batch norm using the fused
ops. The following script reflects these two passes. From the figure, we notice
that the FusedBatchNormGrad requires dy and g (scale) (whose mathematical basis
can be found
here) as well as
r1, r2, and r3. In fact, r1 and r2 are the saved mean and inverse variance
respectively, which are computed from the batch mean and variance. They
are produced and cached during the forward pass and then used in the backward pass
to avoid the overhead of re-compute. To sum up, the saved mean and inverse
variance are designed out of consideration for performance in the batch norm
backpropagation using CUDNN.
Figure 3. Fused batch norm and backpropagation
bn = tf.keras.layers.BatchNormalization(momentum=0.5,
beta_initializer='zeros', gamma_initializer='ones',
moving_mean_initializer='ones', moving_variance_initializer='ones',
fused=True)
x0 = tf.random.uniform((2,1,2,3))
with tf.GradientTape() as t:
t.watch(x0)
y0 = bn(x0, training=True)
loss = tf.reduce_sum(y0)
grads = t.gradient(loss, [x0, bn.trainable_variables])
The saved mean and saved inverse variance (r1 and r2) are usually hidden from
users in Tensorflow. However, we can still peek the contents by explicitly using the ops defined in
tf.raw_ops. The following script shows the code.
y, moving_mean, moving_var, r1, r2, r3 = tf.raw_ops.FusedBatchNormV3(
x=x, scale=scale, offset=offset, mean=mean, variance=variance,
epsilon=0.001, exponential_avg_factor=0.5, data_format='NHWC',
is_training=True, name=None)
print("moving_mean:", moving_mean.numpy())
print("moving_var:", moving_var.numpy())
print("saved mean:", r1.numpy())
print("saved inv var:", r2.numpy())
By feeding the op with the same inputs used in the above exmaple, we can print
the corresponding moving mean/variance and r1/r2 for comparison. The moving
mean/variance are same with the results from the 0th step of the above example
(They are not exactly equivalent because we use fused op here.). Additionally,
we can observe that r1 is essentially the batch mean, while r2 is calculated
by 1 / sqrt(batch_var + 0.001).
moving_mean: [0.7725448 0.7831439 0.8185034]
moving_var: [0.5576107 0.5349634 0.50018483]
saved mean: [0.5450896 0.5662878 0.63700676]
saved inv var: [ 3.3822396 4.325596 27.981367 ]
The complete python script for the batch norm backpropagation is
here.
The script to use tf.raw_ops is
here.
Besides, I prepared a CUDA
sample
to directly call CUDNN library with the same inputs as the above example. From
there we can test that the saved mean/inv variance are not required parameters.
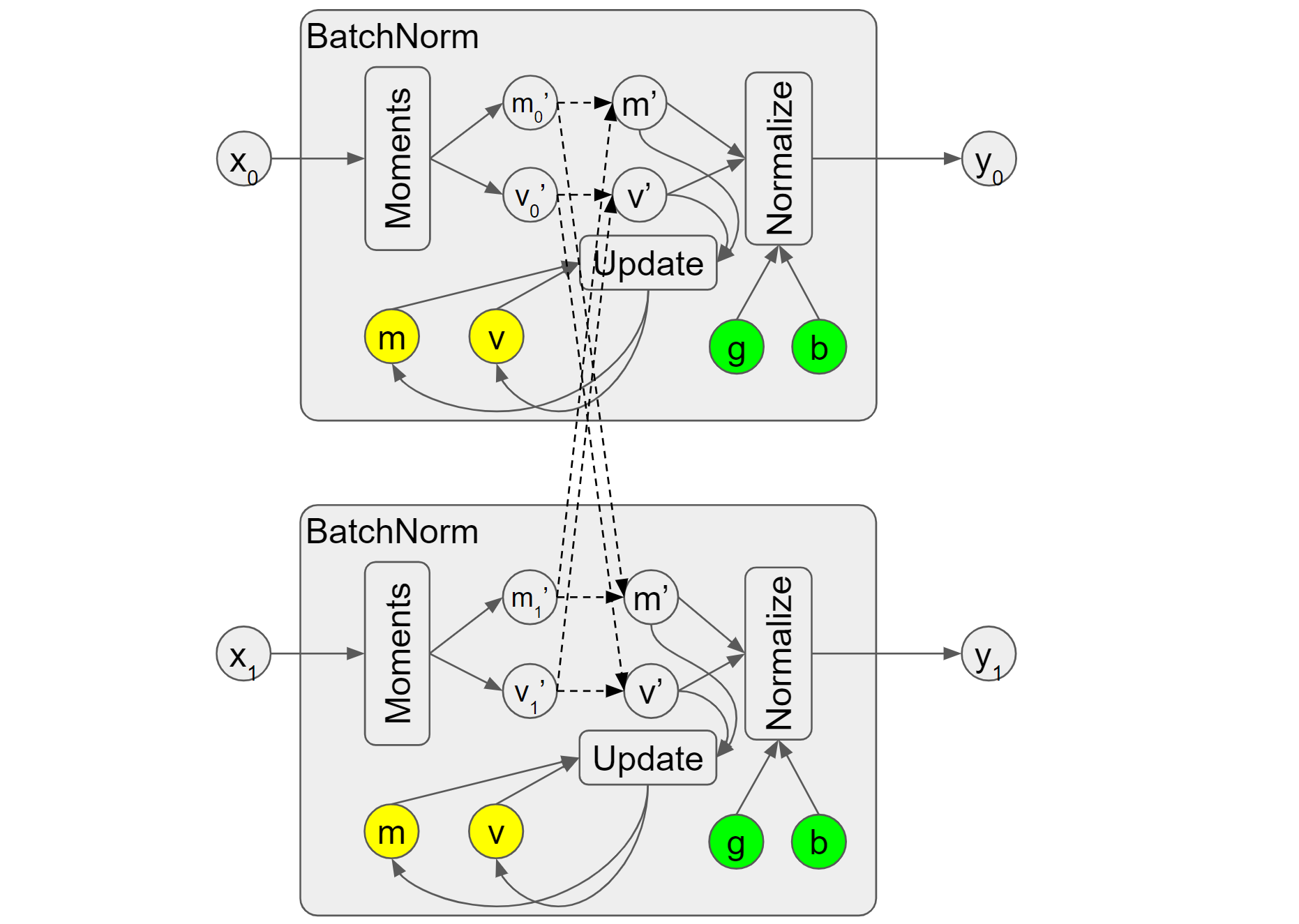
Lastly, I would like to briefly talk about the synchronized batch norm, which
are preferrable when performing distributed training and the batch size are too
small for each compute node. In that case (e.g., the object detection tasks), we
can use synchronized batch norm to get better statistics by considering samples
from different nodes. Here I will use the implementation from the horovod:
hvd.SyncBatchNormalization. It overrides the “Moments” op to conduct
communication among nodes and return the group mean and variance, which
reflect the mean and variance of samples from all participant nodes. In Figure
4, they are denoted as m' and v'. Subsequently, “Update” will take them to
update the moving group mean/variance, and “Normalize” will also take them to
compute the outputs. As we mentioned previously, the fused op doesn’t expose the
batch mean/variance and thus it will be challenging to do the communication to
get the group mean/variance and therefore synchronized batch norm only support
non-fused ops.
Figure 4. Synchronized batch norm
The following script shows how to use the hvd.SyncBatchNormalization. We
intentionally set the different inputs x0 for different ranks.
# Make sure that different ranks have different inputs.
tf.random.set_seed(hvd.local_rank())
x0 = tf.random.uniform((2,1,2,3))
sync_bn = hvd.SyncBatchNormalization(axis=-1, momentum=0.5,
beta_initializer='zeros', gamma_initializer='ones',
moving_mean_initializer='ones', moving_variance_initializer='ones')
print("moving_mean: ", sync_bn.moving_mean.numpy())
print("moving_var: ", sync_bn.moving_variance.numpy())
When running with horovodrun -np 2 python tf_hvd_bn_sync.py, we can get the
outputs below, where the batch mean/variance are actually already group
mean/variance after the communication and the moving mean/variance are computed
based on them.
[1,0]:!!! batch_mean:[0.45652372 0.5745423 0.65629953]
[1,1]:!!! batch_mean:[0.45652372 0.5745423 0.65629953]
[1,0]:!!! batch_var:[0.0657616 0.0710133 0.00523123]
[1,1]:!!! batch_var:[0.0657616 0.0710133 0.00523123]
[1,0]:moving_mean:[0.7282618 0.78727114 0.8281498 ]
[1,1]:moving_mean:[0.7282618 0.78727114 0.8281498 ]
[1,0]:moving_var:[0.5328808 0.53550667 0.50261563]
[1,1]:moving_var:[0.5328808 0.53550667 0.50261563]
Note, the dot lines showing the communication in Figure 4 might not precisely
depict what happens under the hood. The group mean is simply the average
of batch means from different ranks that can be done through an allreduce
communication; however, the
group variance needs a new round of computation with the updated group mean
rather than communication: (x - group_mean) ^ 2 / (N⋅batch_size), where N is
number of ranks.
The complete python script is here.
Introduction People may feel confused by the options of -code, -arch, -gencode when compiling their CUDA codes. Although the official guidance explains the d...
When training neural networks with the Keras API, we care about the data types and computation types since they are relevant to the convergence (numeric stab...
Introduction This post focuses on the GELU activation and showcases a debugging tool I created to visualize the TF op graphs. The Gaussian Error Linear Unit,...
Introduction My previous post, “Demystifying the Conv-Bias-ReLU Fusion”, has introduced a common fusion pattern in deep learning models. This post, on the ot...
Introduction Recently, I am working on a project regarding sparse tensors in Tensorflow. Sparse tensors are used to represent tensors with many zeros. To sav...
Introduction On my previous post Inside Normalizations of Tensorflow we discussed three common normalizations used in deep learning. They have in common a tw...
Introduction Recently I was working on a project related to the operation fusion in Tensorflow. My previous posts have covered several topics, such as how to...
Introduction My previous post, “Fused Operations in Tensorflow”, introduced the basics of operation fusion in deep learning by showing how to enable the grap...
Introduction The computations in deep learning models are usually represented by a graph. Typically, operations in the graph are executed one by one, and eac...
Introduction Horovod is an open source toolkit for distributed deep learning when the models’ size and data consumption are too large. Horovod exhibits many ...
Introduction Recurrent Neural Network (RNN) is widely used in AI applications of handwriting recognition, speech recognition, etc. It essentially consists of...
Introduction Recently I came across with optimizing the normalization layers in Tensorflow. Most online articles are talking about the mathematical definitio...